Ну вот. А я тут спрашивал, когда он выдается, говорили, что только при записи байта. Значит надо пересмотреть диаграммы.Сообщение от Alex_K





Ну вот. А я тут спрашивал, когда он выдается, говорили, что только при записи байта. Значит надо пересмотреть диаграммы.

С любовью к вам, Yandex.Direct
Размещение рекламы на форуме способствует его дальнейшему развитию
А обычно на него и реагируют только при записи (DOUT) байта.
Хотя, конечно, мысль интересная - после приёма адреса быстрее шинные драйвера переключать, если будет НЕ ЗАПИСЬ.
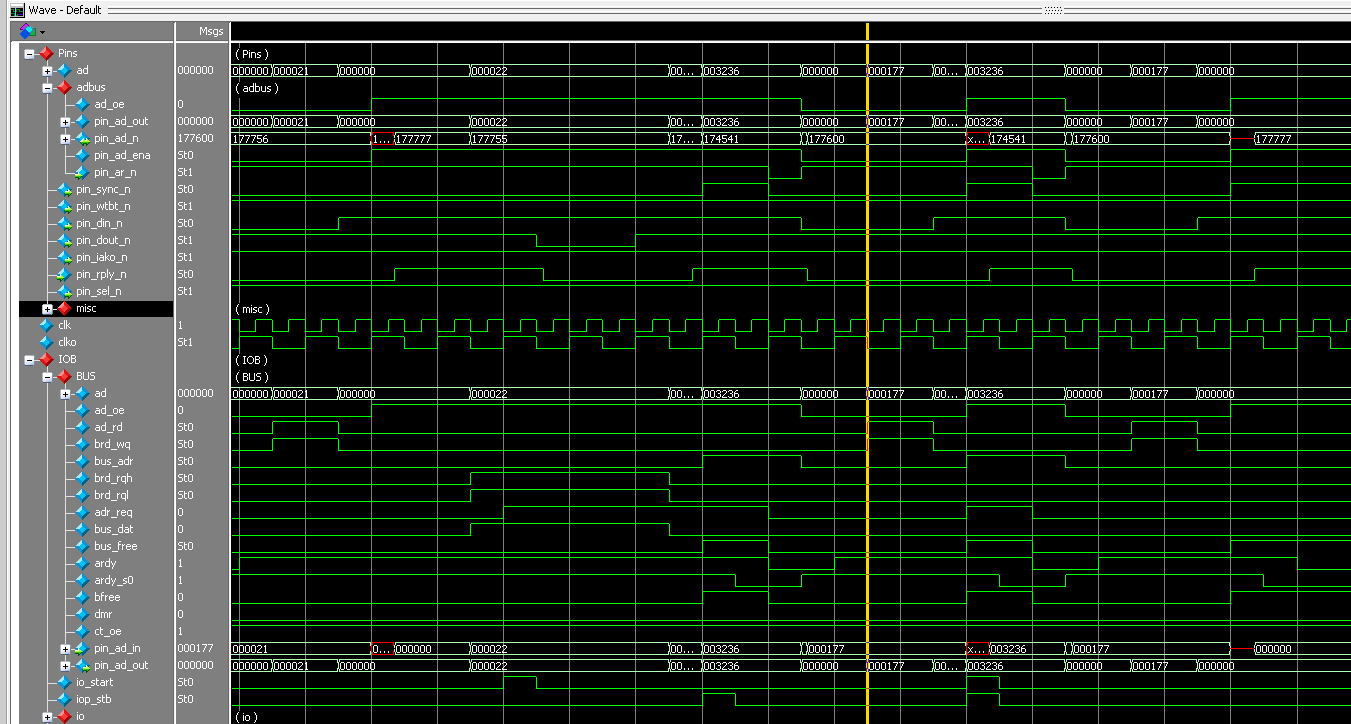
Интересный тогда еще вопрос. Почему по диаграммам @Ynicky сигнал DOUT выдается через 5 тактов после SYNC (или 4 такта после окончания WTBT). Тогда как при записи DIN выдается через такт после SYNC.
- - - Добавлено - - -
В общем, внесу коррекцию в описание.
Процедура записи чтения, как есть по SYNC, а процедура записи будет по DOUT. Что байтовая, что словная.
Видимо, это сделано именно потому, что в случае записи интервал между SYNC и DOUT слишком большой, и нельзя начинать писать настолько заранее, т.к. в этот промежуток может влезть целый слот памяти. А в случае с чтением можно начинать сразу по SYNC, т.к. DIN воспоследует уже через один такт. Это на такт ускоряет процесс чтения.
- - - Добавлено - - -
Обновил 1515ХМ2-003.
- Оптимизированна схема для более легкого понимания
- Исправлены неточности
p.s.: Особое внимание требуют RS-триггеры, которые при оптимизации могут превратиться в мину замедленного действия, связанную с тем, что прямой и инверсный выход RS-триггера неравнозначны. Если на прямом выходе 0, это еще не значит, что на инверсном будет 1. И наоборот. Это связано с тем, что вход R имеет приоритет на прямом выходе, а вход S на инверсном. Или говоря проще - если на R и S установлены единицы, то и прямой выход, и инверсный будут в 0.
Поэтому при оптимизации нельзя просто так перебрасывать сигнал с инверсного выход на прямой, или же убирать один из выходов, если в схеме используются два.
В данном реверсе я допустил подобную ошибку в схеме установки RPLY, но исправил ее. И проверил все остальные RS-триггеры в схеме.
Посмотрел схему ХМ2-001, и заметил, что при чтении данных, сами данные на шину AD выставляются одновременно с сигналом RPLY. Не опасно ли для ВМ2 это делать одновременно? Или же ВМ2 не сразу защелкивает данные с шины по сигналу RPLY, а чуть с задержкой, чтобы данные успели устаканиться?
Titus, читайте ТО, лист 46. Там сказано: "Для обеспечения надёжного приёма данные нужно выставлять на выводах AD(0-15) не позже, чем через 2/3 T после выставления сигнала RPLY и снимать их не ранее, чем снимется сигнал DIN." Диаграмма на листе 47.
Titus(16.08.2020)
nRPLY должен поступать после активации nDIN/nDOUT, если nRPLY поступит даже мгновенно после этих стробов, то минимум проходит целый такт пока процессор защелкивает nRPLY внутри (rply0) и вырабатывает внутренний строб записи данных (bus_wq) с шины nAD во внутренний латч. Поэтому данные легко могут быть выставленны не то что одновременно с RPLY, но и до такта задержаться (а то и до двух - как повезет с соотношением RPLY с фазой F1). Стандарт МПИ, кстати, допускает выставление RPLY до данных - 200нс, как раз примерно один внутренний такт ВМ2 при внешней частоте 10МГц.
Описал все 4 БМК в первом приближении.
Написал простую тестовую программу проверки начальной инициализации ЦП.
Промоделировал. ACLO и DCLO на ЦП устанавливается как надо и процессор стартует с адреса о160000.
Но сигнал /RPLY не завершается. Может что-то не так с REPLY LOGIC в ХМ2-003?
nzeemin(17.08.2020)
Логика очень проста. По отрицательному спаду на CAS0/CAS1 (A51) на выходе N40 устанавливается REPLY.
Нашел у себя ошибку.
nzeemin(17.08.2020)
Видеовыход как будешь моделировать и получать картинку?
- - - Добавлено - - -
Я, кстати, все еще проверяю и оптимизирую реверсы, и порой нахожу неточности. Вернее, неточностей почти нет. Только изредка в RS-триггерах, т.к., как я уже писал выше, это мина замедленного действия после оптимизации, если их точно не проверить. Вот сейчас и проверяю.
Эту тему просматривают: 1 (пользователей: 0 , гостей: 1)
 Ваши права
Ваши права

 Ответить с цитированием
Ответить с цитированием


