БK 0010-01, БК 11М, БК11М+,МС 0511 (УКНЦ)х3, Atari 65XE, Commodore 64, AMIGA 500 (HDD), ZX EVO
@Alex_K, @Vslav, интересную особенность заметил в микрокоде ВМ2, но пока подробно в этом не разбирался.
В режимах HALT и USER по разному анализируется ситуации при выборке следующей команды, когда адресация регистра-источника модифицирует R7, и когда регистр приемник использует R7. Хотя, казалось бы, какая разница, какой режим, HALT или USER.
Это при выборке следующей команды или предвыборке следующей команды? Какие типы адресаций - 67 и 77? Если используется 67 или 77, то по идее процессор может использовать предвыбранную команду в качестве индексного значения для адресации. Да, и в режиме HALT с запрещёнными прерываниями CPC и CPSW не обновляются.Сообщение от Titus

А, вот, наверное, с этим и связано.
- - - Добавлено - - -
Пока еще не разбирался.
Но там два условия, обозначенных признаками RI0 и RI2:
RI0 - dd использует R7 (любая адресация, с использованием R7)
RI2 - ss модифицирует R7 (любая адресация по (R7), либо индексная адресация)
T.e. ss = (R7), (R7)+, -(R7), @(R7)+, @-(R7), X(Rn), @X(Rn)
Обновление CPSW происходит не на уровне микрокода, а на аппаратном уровне. Запрещается при установленных битах 7 и 8 в PSW. А вот обновление CPC, не смотрел как происходит. Да и счетчиков команд там целых три.
Тоже пока не смотрел, просто заметил это разветвление.
Типа, если USER, то мы проверяем адресацию по R7, если HALT, то мы ничего не проверяем, но идем другим путем.
Коротко об интересном.
В процессоре ВМ2 дофигищи 16-битных регистров. Гораздо больше, чем доступно посредством инструкций PDP-11.
Если бы микрокод был другим, то, я думаю, процессор мог быть гораздо интереснее и богаче по возможностям.
Интересно, что на шину X АЛУ может выставляться один из 16 регистров,
А на шину Y АЛУ может выставляться один из 32 регистров/констатнт/частей слова инструкции:
В списке нет, например, PC2, который может читаться только на шину X АЛУ.Код:0 - R0 1 - R1 2 - R2 3 - R3 4 - R4 5 - R5 6 - R6 7 - PC1 8 - EA1 9 - EA2 10 - нет регистра 11 - RS 12 - PSW 13 - ACC 14 - RA 15 - BRD 16 - IR & 0x000F 17 - IR & 0x003F 18 - 0x0001 (если ALT_CNST=0 (байтовый инкремент))), 0x0002 (если ALT_CNST=1 (словный инкремент)) (константа автоинкремента при формировании исполнительного адреса) 19 - 0x0002 20 - 0x0000 21 - 0x0004 22 - CPSW 23 - BIR 24 - IR & 0x00FF с расширением знака до 16 бит 25 - 0x0000 (если PSW3=0), 0xFFFF (если PSW3=1) (флаг N) 26 - PSW0 & 0x0001 (флга C) 27 - 0x0000 28 - выбор константы вектора прерывания 29 - 0x0014 30 - PC 31 - PC
А какие регистры?
- - - Добавлено - - -Код:0 - R0 1 - R1 2 - R2 3 - R3 4 - R4 5 - R5 6 - R6 7 - PC1 (если RA_FR1 = 0) или PC2 (если RA_FR1 = 1) 8 - EA1 9 - EA2 10 - нет регистра 11 - RS 12 - PSW 13 - ACC 14 - нет регистра 15 - BRD
Кроме того, есть запись результата обратно в регистр, который выставлялся на X или на Y:
Обратная запись для X:
Код:0 - R0 1 - R1 2 - R2 3 - R3 4 - R4 5 - R5 6 - R6 7 - PC2 8 - EA1 9 - EA2 10 - EA_CTLD (счетчик для расширенной арифметики) 11 - RS 12 - PSW (если /NA0=1, то запись и в PSW4), (если операция со словом (BYTE=0), то запись в PSW4 и PSW8). Работа с константой (PL8=1) блокирует WR_PSW. 13 - ACC 14 - нет регистра 15 - BRD (если QD_SWAP=1, то QSWP=1) (обмен байт при обращении по нечетному адресу)
Обратная запись для Y:
Код:0 - R0 1 - R1 2 - R2 3 - R3 4 - R4 5 - R5 6 - R6 7 - PC2 8 - EA1 9 - EA2 10 - EA_CTLD (счетчик для расширенной арифметики) 11 - RS 12 - PSW (если /NA0=1, то запись и в PSW4), (если операция со словом (BYTE=0), то запись в PSW4 и PSW8). Работа с константой (PL8=1) блокирует WR_PSW. 13 - ACC 14 - нет регистра 15 - BRD (если QD_SWAP=1, то QSWP=1) (обмен байт при обращении по нечетному адресу) 16 - R0 17 - R1 18 - R2 19 - R3 20 - R4 21 - R5 22 - CPSW 23 - R7 24 - EA1 25 - EA2 26 - EA_CTLD (счетчик для расширенной арифметики) 27 - RS 28 - PSW (если /NA0=1, то запись и в PSW4), (если операция со словом (BYTE=0), то запись в PSW4 и PSW8). Работа с константой (PL8=1) блокирует WR_PSW. 29 - ACC 30 - PC 31 - PC
Краткое описание ядра и основного цикла процессора 1801ВМ2.
Описание составлено исключительно по оригинальной потранзисторной схеме @Vslav'a, за которую ему огромная благодарность.
Все сигналы имеют те же наименования, что и на транзисторной схеме Vslav'a. За исключением сигналов NA0..NA5 (адрес следующей микрокоманды), и сигналов PL0..PL36 (выход ПЛМ микрокоманд), которые при описании микрокоманды и адреса микрокоманды приведены в инверсном виде, что более точно отражает суть информации, заложенной в них. Кроме того, добавлено некоторое количество сигналов, не именованых на схеме Vslav'а.
В данном описании будет рассмотрено ядро процессора на примере простейшего цикла выборки команды типа регистр-регистр. Прерывания, таймауты шины и прочие тонкости пока что не рассматриваются.
Основным времязадающим и управляющим узлом процессора является микропрограммный автомат, который непосредственно управляет АЛУ и блоком ввода-вывода. Управление АЛУ синхронное, т.е. можно сказать, что АЛУ является частью микропрограммного автомата. Управление блоком ввода-вывода асинхронное.
Каждая инструкция процессора выполняется как минимум за две микрокоманды. Первой из которых всегда является команда выборки и преддекодирования инструкции. Цикл микрокоманды равен 4-м тактам входной частоты процессора CLCI. В дальнейшем тактом будет называться один цикл CLCI, а полутактом - половина цикла CLCI. Цикл АЛУ в большинстве случаев также выполняется за 4 такта синхронно с микророграммным автоматом. АЛУ используется как для выполнения математическо-логических операций, так и для вычисления исполнительного адреса. Цикл чтения шины AD блока вввода-вывода, при отсутствии задержек доступа к внешнему устройству, выполняется за 8 тактов. Исключение составляет недокументированный режим чтения шины с опережающим RPLY, который выполняется за 6 тактов, и рассматриваться здесь не будет.
Для выполнения простейшей инструкции процессора требуется две микрокоманды (8 тактов), и один один цикл ввода (8 тактов). Блок ввода-вывода работает в параллель с микропрограммным автоматом, поэтому общее время выполнения простейшей инструкции также составляет 8 тактов.
Микропрограммный автомат может приостанавливаться в некоторых случаях. Чаще всего это происходит, когда буферный регистр инструкции (BIR) еще не содержит действительных данных. Выполнение микропрограммы приостанавливается, пока блок ввода-вывода не прочитает с шины слово инструкции и не обновит BIR.
Микропрограмма находится в ПЛМ микрокоманд, и состоит из 198-ми записей, которые, в свою очередь, условно обьединены примерно в 64 микрокоманды. Та или иная запись выбирается в зависимости от условий, передаваемых в ПЛМ в виде адреса инструкции (16 бит), получаемого с преддекодера адреса микрокоманды (6 бит) и двух трехбитных модификаторов RI0,RI1,RI2 и IX0,IX1,IX2. Преддекодер для упрощения пока что не рассматриваем.
В зависимости от входных данных, выбирается одна или несколько записей ПЛМ, которые обьединяются по логическому ИЛИ (OR), и поступают на выход матрицы в виде сигналов PL0..PL36. В сигналах PL закодированы следующие данные:
1. Номер регистра для шины X АЛУ.
2. Номер регистра или константы для шины Y АЛУ.
3. Математическо-логическая функция для АЛУ.
4. Функция сдвига для АЛУ.
5. Тип операции ввода-вывода.
6. Группа модификаторов, влияющих на выполнение команды.
Трехбитный модификатор выборки микрокоманды RI имеет многофункциональное назначение. В микрокоманде выборки слова инструкции значение следующее:
RI0 - поле dd инструкции использует R7 (любая адресация, с использованием R7)
RI1 - HALT-режим (PSW[8]=1)
RI2 - поле ss модифицирует R7 (адресация (R7), (R7)+, -(R7), @(R7)+, @-(R7), X(Rn), @X(Rn))
Другие значения поля RI будут рассмотрены в отдельной главе.
Трехбитный модификатор выборки микрокоманды IX может меняться для каждого шага микрокоманды и означает:
IX0 - идентификатор словной двухоперандной инструкции записи
IX1 - двухоперандная инструкция использующя R7, выполнено условие условного перехода, или RCMD (требует уточнения)
IX2 - некоторые двухоперандные инструкции
Кроме того, блок преддекодера выдает следующие сигналы, влияющие на исполнение микрокоманд:
DC_RTT - инструкция RTT
DC_FB - инструкция работает с байтом, а не словом
DC_MOP0 и DC_MOP1 - кодирует тип цикла инструкции:
Часть сигналов PL, получаемых с выхода ПЛМ микрокоманд используется для выбора режима работы микрокоманды. Большинство же запоминаются в регистре слова микрокоманды (REG_MCMD_WORD), и доступны в виде PLM0..PLM36. Часть сигналов инвертируется.Код:DC_MOP1 DC_MOP0 Операция ввода-вывода Цикл памяти 0 0 IO_RD, IO_IN, IO_WR RMW 0 1 IO_WR W 1 0 IO_RD, IO_IN R 1 1 NOWRA -
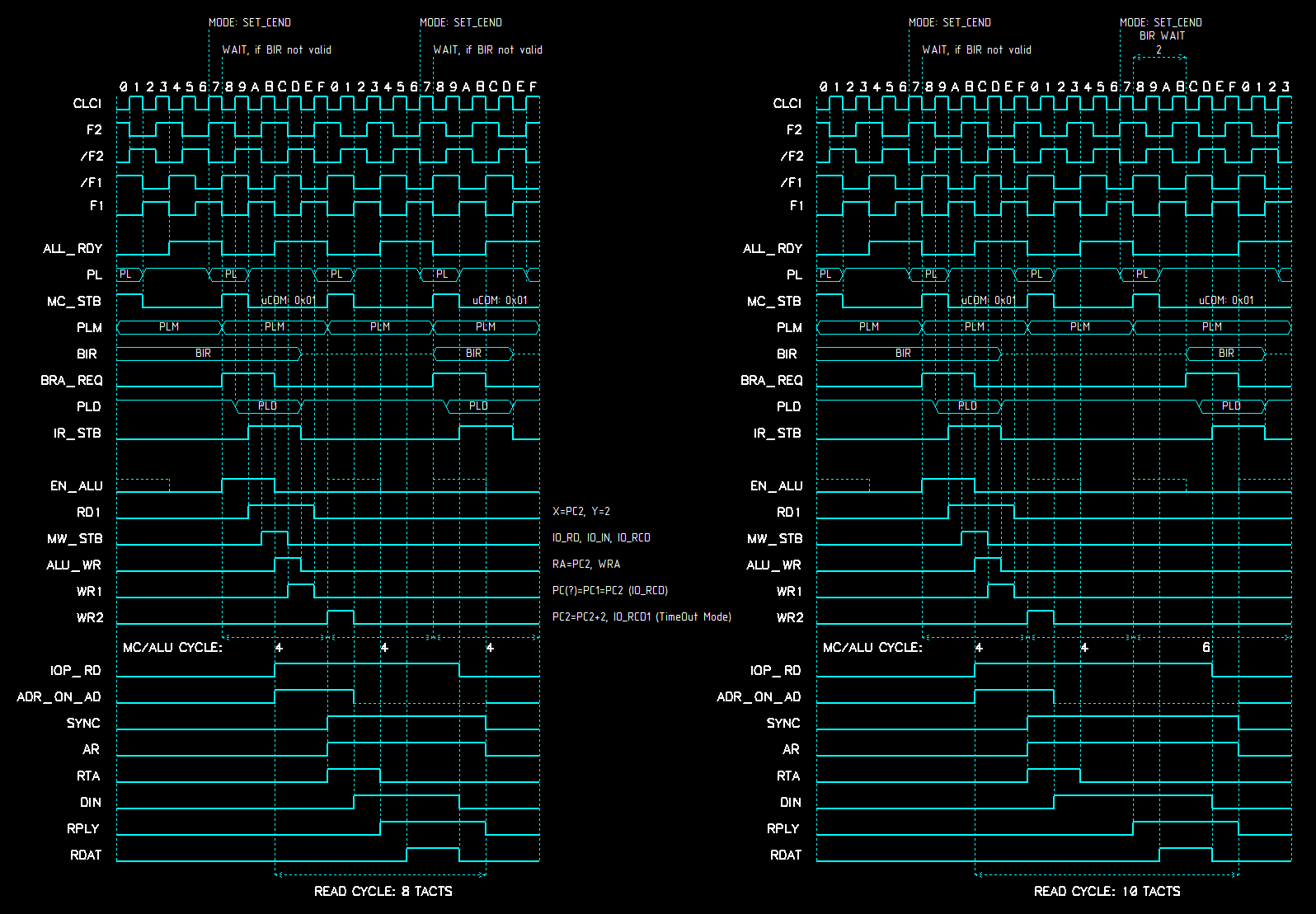
Диаграммы работы микропрограммного автомата, АЛУ и блока ввода-вывода на примере выполнения простейшей инструкции типа регистр-регистр.
Слева пример с нулевой задержкой памяти, справа пример с задержкой памяти на 2 такта:
Для каждой инструкции выполняется микрокоманда с адресом 0x01 (выборка инструкции), и микрокоманда исполнения самой инструкции.
Для наглядности приведен только один цикл АЛУ, и один цикл блока ввода-вывода.
Код:Полутакт: 7 - Готовы сигналы PL с ПЛМ микрокоманд. Модификатор микрокоманды SET_CEND, означающий выборку следующей инструкции. Адрес микрокоманды 0x01. 8 - Начало микрокоманды. Регистр BIR (буферный регистр инструкции) содержит действительны данные, поэтому безо всякой задержки запускается конвейер преддекодера инструкции. 9 - Данные с преддекодера инструкций выставляются на шину PLD. 10 - Данные с преддекодера инструкций стабильны и могут быть защелкнуты в регистре инструкций. Они содержат слово инструкции, адрес первой микрокоманды инструкции, модификаторы IX, RI. В соответствии с микрокомандой на шину X АЛУ выдается PC2 (опережающий счетчик команд), а на шину Y АЛУ выдается константа 0x0002. 11 - В соответствии с микрокомандой формируется операция ввода-вывода IO_RD (чтение шины AD), IO_IN (данные предназначены для BIR), IO_RCD (сохранять данные также в BRD (буферный региср данных) 12 - RA (регистр адреса) = PC2. Запросить цикл шины IO_RD. Блок ввода-вывода свободен, поэтому сразу начинается операция ввода. На шину адреса выставляется регистр адреса RA, в котором содержится значение опережающего счетчика команд PC2. 13 - PC=PC1=PC2 (действие операции IO_RCD). 16 - PC2=PC2+2 (результат работы АЛУ). Выставляется сигнал SYNC (адрес выставлен на шине). Сразу получаем в ответ сигнал AR (подтверждение получени адреса). В этом же полутакте начинается исполнение следующей микрокоманды, собственно и выполняющей инструкцию. 18 - Выставляется сигнал DIN (ввод информации с шины). 20 - Получено подтверждение RPLY. 22 - Данные на шине AD стабильны, и начинают записываться в регистры BIR и BRD. 24 - Начало следующей микрокоманды, извлекающей инструкцию из регистра BIR. 26 - Снимается сигнал DIN. Шина AD может быть освобождена. 28 - В ответ внешнее устройство снимает SYNC, AR и RPLY. Возможна новая операция ввода-вывода.
Последний раз редактировалось Titus; 18.11.2020 в 21:52.
Эту тему просматривают: 1 (пользователей: 0 , гостей: 1)
 Ваши права
Ваши права


 Ответить с цитированием
Ответить с цитированием