По умолчанию эмулятор всем прерываниям ставит приоритет 7.Сообщение от form

С контроллерами DX, DY и DW как раз такая ситуация.
MY выставляет прерывание с приоритетом 4.
Насколько это правильно ?




По умолчанию эмулятор всем прерываниям ставит приоритет 7.
С контроллерами DX, DY и DW как раз такая ситуация.
MY выставляет прерывание с приоритетом 4.
Насколько это правильно ?
Неправильно - не должны устройства ломиться выше таймера.
PDP-11/83, Электроника МС0511 (УК-НЦ), DECserver 90M
Q-Bus: H9278-A, DLV11-J, DZQ11, DHV11, DELQA-M, LPV11, CQD-420/TM, DRV11
PMI: KDJ11-BF, MSV11-JE
VT220, CM7209
Ну, поскольку в реале пользователь сам распознает (узнает из документов) скорость позиционирования привода и сообщает об этом системе с помощью джампера, то, возможно, имеет смысл сделать программный "джампер", которым пользователь будет рулить эмуляцией DW. Типа DWSeekSpeed={low, high, max, auto}, где lo и hi понятно, max - полная возможная скорость, эмуляция задержки на перемещение головок не нужна и auto (default) - 5мБ - lo, остальные - hi.
Кто мешает тебе выдумать порох непромокаемый? (К.Прутков, мысль № 133)
Если дать пользователям возможность ускорять эмуляцию дисковых устройств - стимул к написанию драйверов единственного быстрого диска HD пропадёт.
А что, их так много? Для RT-11 драйвер уже есть, для RSX-11 form уже склепал, для ДИАМСа я сделаю, а куда еще? Ну, и размер - DW максимум 64М, так, что если надо больше - HD Only. Кстати, HDX.SYS для TSX годится?
Кто мешает тебе выдумать порох непромокаемый? (К.Прутков, мысль № 133)
Надо проверять.
...
В следующем релизе приоритеты дисковых устройств будут такими:
Код:1. DX, DY - BR5, Position_1 2. DW - BR5, Position_2 3. MY - BR5, Position_3
Годится. Там не используется APR6 mapping, а это по сути единственное, что нужно переделывать из обычных вещей. TSX к слову опробовал - без проблем за исключением таймера - мой патч таки не помог. Можно пока тупо заглушить проверку, а там разберемся.
- - - Добавлено - - -
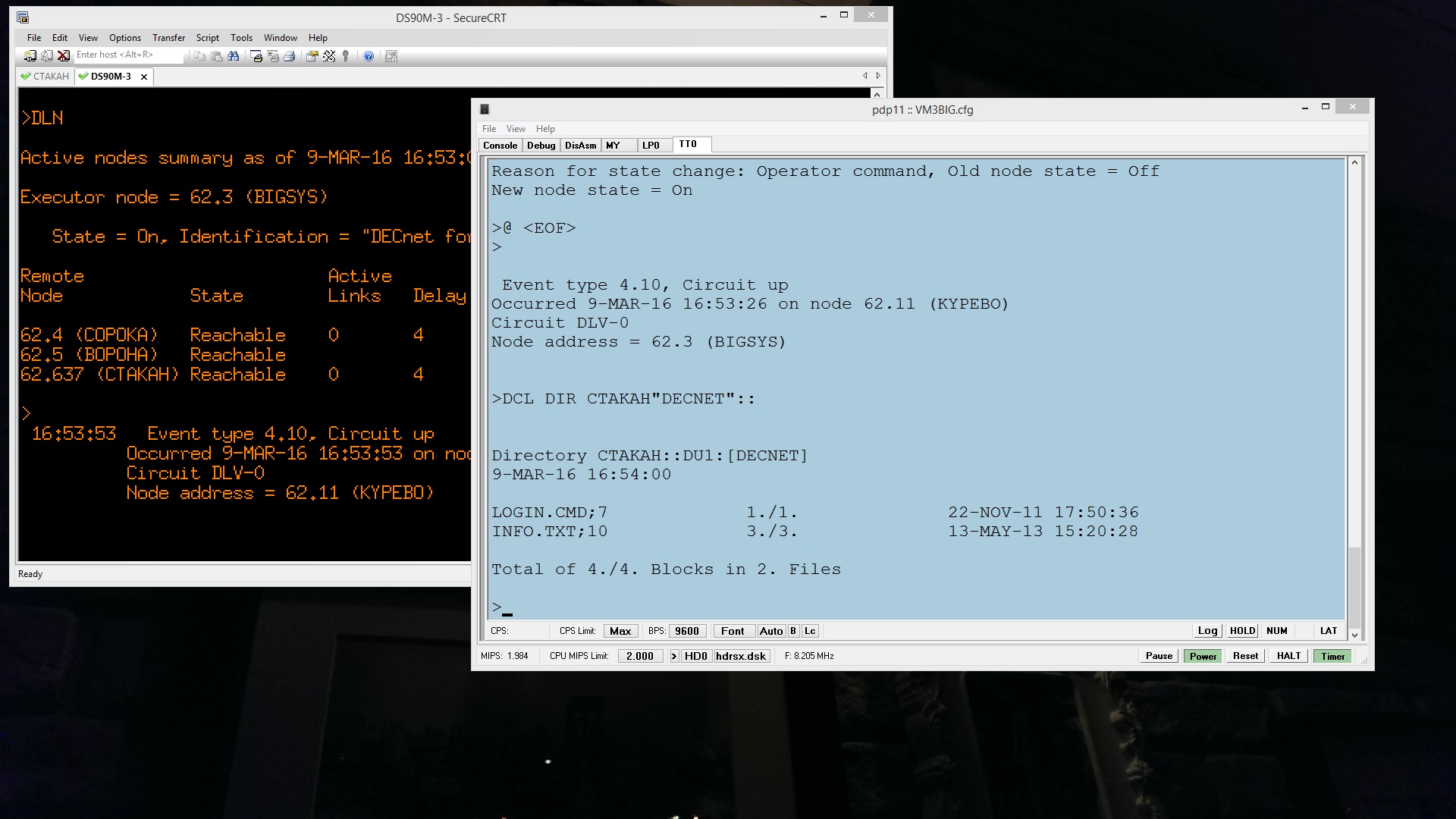
DECnet в RSX-11M завелся!
- - - Добавлено - - -
Если кому интересно - какое-то время эмулятор DVK еще будет видно в HECnet. Можно зайти на него командой SET HOST KYPEBO с любого места в HECnet
Там HEL GUEST/
Последний раз редактировалось form; 09.03.2016 в 14:03.
PDP-11/83, Электроника МС0511 (УК-НЦ), DECserver 90M
Q-Bus: H9278-A, DLV11-J, DZQ11, DHV11, DELQA-M, LPV11, CQD-420/TM, DRV11
PMI: KDJ11-BF, MSV11-JE
VT220, CM7209
В корзине ДВК сначала идет MY, а потом DW.
Можно у Andrey_Ak замерить реальные приоритеты.
PDP-11/83, Электроника МС0511 (УК-НЦ), DECserver 90M
Q-Bus: H9278-A, DLV11-J, DZQ11, DHV11, DELQA-M, LPV11, CQD-420/TM, DRV11
PMI: KDJ11-BF, MSV11-JE
VT220, CM7209
Кстати, а может подключим к эмулятору магнитную ленту? Желательно, конечно не МТ, а что-то покруче, с 22-битным адресом... Или, как вариант, CT, чтобы вообще без DMA...
Кто мешает тебе выдумать порох непромокаемый? (К.Прутков, мысль № 133)
Эту тему просматривают: 2 (пользователей: 0 , гостей: 2)
 Ваши права
Ваши права

 Ответить с цитированием
Ответить с цитированием